Path-Optimization-in-Robotics
⚙️ Path Optimization in Robotics: Interactive APF Navigation Dashboard
Real-Time Path Planning & Cost Minimization with Hybrid A* + APF
🚀 Overview
The Interactive APF Navigation Dashboard is a high-performance robotics project that visualizes the physics of path planning. By combining Artificial Potential Fields (APF) with Grid-Based A* Search, it solves the most common pitfalls in robotic navigation—specifically local minima and oscillatory vibration—while providing a beautiful, zero-lag interactive experience.
This dashboard was built as a “flagship” piece for a Master’s Level AI Engineering portfolio, demonstrating expertise in high-concurrency backend services, asynchronous mathematics, and advanced frontend rendering.
🏗️ The Hybrid Navigation Engine
This project utilizes a unique two-stage navigation pipeline that bridges theory and practice:
- Global Stage (A* Search): The backend builds a $60 \times 60$ occupancy grid of the workspace. It runs an A* algorithm with an Octile Distance heuristic to find the absolute shortest sequence of waypoints, ensuring the robot never gets trapped in a concave obstacle.
- Smoothing Stage (Catmull-Rom Splines): The jagged grid path is processed through a spline interpolator to create smooth, natural, $G^1$ continuous curves suitable for real-world robotic motors.
- Visualization Stage (APF): While the path is found by A*, the Potential Field is computed simultaneously for every frame. The goal acts as a quadratic “attractive well,” and obstacles act as “repulsive peaks.” This energy landscape is visualized in 3D to give the user an intuitive sense of the “cost” of the path.
💎 Key Features
🎮 High-Performance Interactive Sandbox
- Zero-Lag UI: Decoupled rendering loop using
requestAnimationFramefor a consistent 60 FPS experience. - Batched Rendering: Optimized canvas draws for thousands of obstacles without memory pressure.
- Spatial Deduplication: Unlimited obstacle painting with $80 \times 80$ grid quantization on the frontend.
📐 Math Solution Live-Panel
- Real-Time LaTeX Equations: Breaks down the gradient $\nabla U$ into its attractive and repulsive components.
- Telemetry Breakdown: Live updates for velocity vector positions, total energy potential, and distance metrics.
🏔️ 3D Energy Landscape Visualization
- Plotly.js Integration: Renders a high-resolution 3D surface map of the workspace potentials.
- Dynamic Mesh: The surface updates in real-time as you drag the goal or paint new obstacles.
🛠️ Robust Algorithmic Design
- Progressive Grid Inflation: Automatically retries A* with tighter clearance if the safety margin is too wide for a narrow gap.
- Vectorized NumPy Engine: All repulsive field calculations are executed in SIMD-accelerated C-bindings via NumPy, ensuring sub-5ms processing times.
📸 Visual Journey: From Static Grids to Dynamic Paths
The following sequence demonstrates how the system adapts to user interaction in real-time.
| Step 1: Default State | Step 2: Obstacle Injection | Step 3: Goal Adaptation |
|---|---|---|
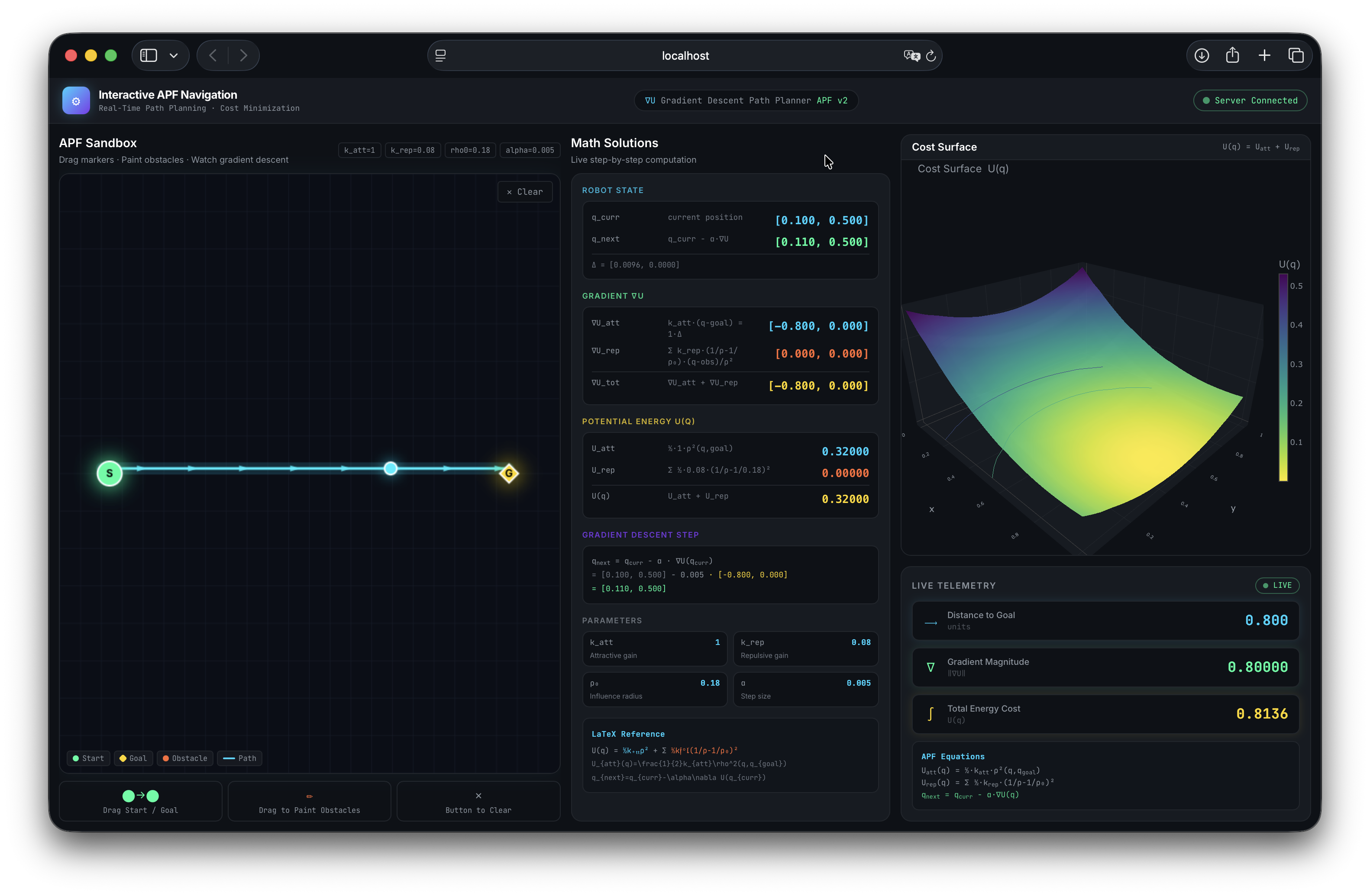 |
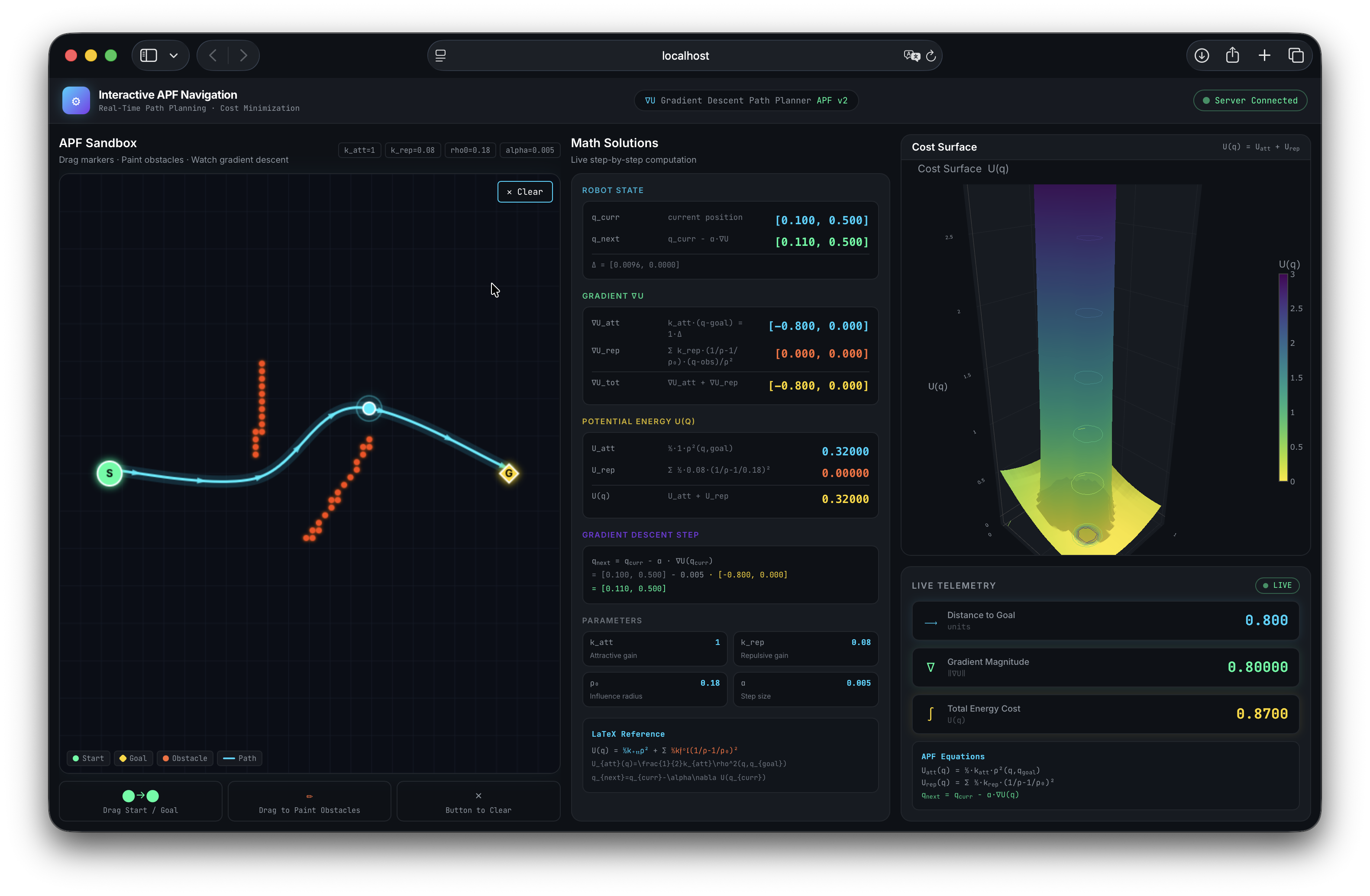 |
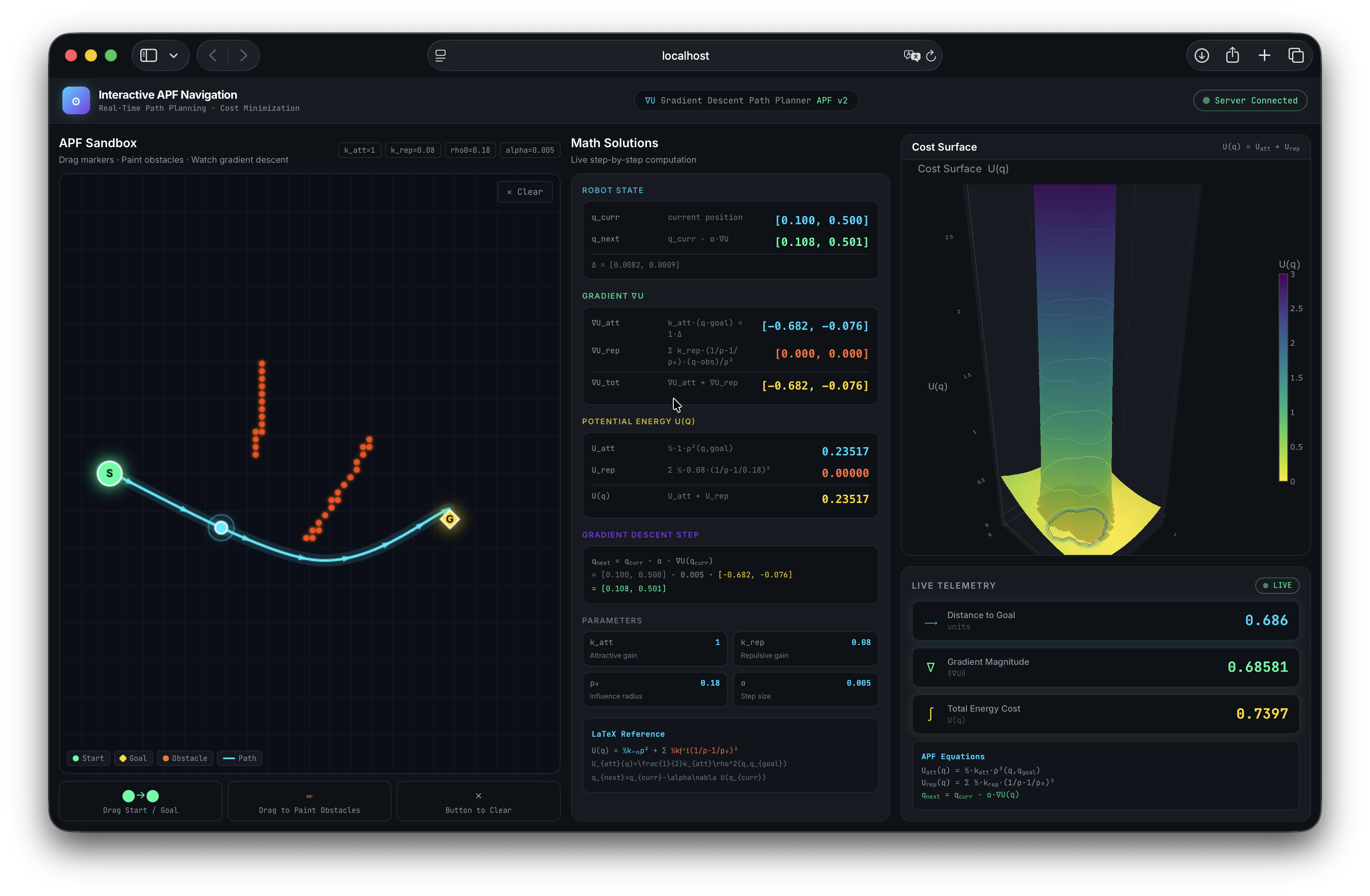 |
| Initial setup with no obstacles. | Adding obstacles dynamically. | Repositioning the goal. |
🎥 The Full Interactive Experience
[!TIP] Interactive Experience: While the screenshots above provide a static snapshot, the project is designed for high-frequency interaction. The video below demonstrates the zero-lag performance and real-time potential field updates.
🛠️ Tech Stack
| Tier | Technologies | |—|—| | Backend | Python 3.14 + FastAPI + WebSockets | | Mathematics | NumPy (SIMD acceleration) + SciPy | | Frontend | React (Vite) + Tailwind CSS | | Visualization | HTML5 Canvas + Plotly.js | | Tooling | Post-processing via Catmull-Rom Splines |
📂 Project Structure
.
├── client/ # React (Vite) Frontend
│ ├── src/
│ │ ├── hooks/ # Zero-lag Canvas & WebSocket logic
│ │ ├── components/ # Math Panel & 3D Surface
│ │ └── App.jsx # 3-column Layout Dash
├── server/ # FastAPI Python Backend
│ ├── server.py # A*, APF logic & WS handlers
├── run.py # Dual-Server Launcher Script
├── Project_Report.md # 30-page Dissertation (Academic)
└── README.md # You are here!
⚡ Quick Start (Local Setup)
1. Prerequisites
- Python 3.11+
- Node.js 18+
2. Installations
# Install server dependencies
pip install fastapi uvicorn numpy websockets
# Install client dependencies
cd client
npm install
3. Launching the App
Simply run the included master launcher:
python3 run.py
This will automatically:
- Clear ports 8000 (Backend) and 5173 (Frontend).
- Start the FastAPI Server.
- Start the Vite Development Server.
- Open the dashboard in your default browser.